ロビ1.5 その9(ハイブリッドロビ)
2024年3月11日
動作が安定しているのロビ1をベースにロビ2の機能が使えるようにマイコンボードを変更してロビ2化しています。
ロビ1とロビ2ではサーボケーブルが違うためそのままではマイコンボードを置き替える事はできません。
そこでロビ1のサーボケーブルとロビ2のサーボケーブルで変換ケーブルを作ってロビ2のマイコンボードに接続しています。
今回ロビ1のマイコンボードに簡単に戻せるように変更してみました。
すなわちロビ1のマイコンボードとロビ2のマイコンボード両方に対応したロビにしてみました。
変換ケーブルの作成
ロビ1.5の変換ケーブルを元のロビ1のサーボケーブルに戻せばロビ1のマイコンボードに接続する事ができます。
しかしマイコンボードに接続しているサーボケーブルを付け替えるにはロビを分解する必要があります。
ロビ1の場合両腕のサーボケーブルを取り替えるには頭を分解する必要がありかなり厄介です。
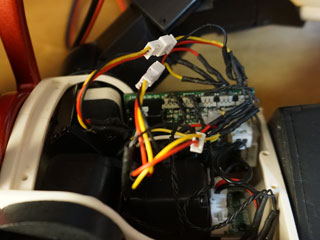
そこでサーボケーブルをコネクターで接続する事でマイコンボードに接続するケーブルをロビ1用とロビ2用に交換する事でどちらのケーブルにも変更できるようにしました。
サーボケーブルは3線なので今回使用したコネクターはこちらを使いました。
コネクターはオスとメスがありますがサーボ側マイコン側でどちらを使っても構わないと思いますが今回はサーボ側(本体側)をメス、マイコン側をオスにしました。
今回はロビを分解しなくてもいいように直接メス側のコネクターケーブルをハンダ付けしました。
ロビ1.5で使用していたロビ2のサーボケーブルはオスのコネクターケーブルをハンダ付けしてロビ2のマイコンボード用として作成しました。

ロビ1のサーボケーブルをオスのコネクターケーブルをハンダ付けしてロビ1用のケーブルを作成しました。

マイコンボードへの接続
ロビ2のマイコンボードへの接続

ロビ1のマイコンボードへの接続
今回ケーブルを長めにしたのでかさばってしまいましたが何とかロビの本体に納める事ができました。
短くする事でもっとコンパクトにまとめる事ができると思います。
今回変更したロビ1.5にはRTC(リアルタイムクロック)が付いていますがロビ1のマイコンボードにした時に影響はないようです。
なお今回行ったようなロビの改造を行うとデアゴスティーニの保証の対象にならなくなるので注意してください。
あくまでも自己責任という事でお願いします。
目次に戻る